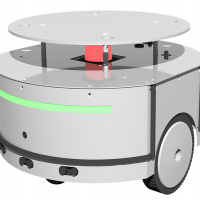
Q300 在工業(yè)室內(nèi)場景下,激光掃描完成雷達水平面的地圖構(gòu)建,通過坐標問詢協(xié)議,為移動機器人實時輸出設(shè)備的二維坐標與航向角(x.y.θ)
控制器使用一套激光測量系統(tǒng),在一個平面借助激光束敏感地掃描其周圍的輪廓,在二維坐標系中測量其周圍環(huán)境。傳感器測量光從發(fā)射到接 收到反射的飛行時間(TOF,Time of Flight),激光測量設(shè)備就可計算出對象的距離。
根據(jù)實際用戶需求,Inbox 還可以輸出如下信息:
反光柱位置信息,雷達水平面的地圖、查詢定位精度。導(dǎo)航系統(tǒng)可以使用這些信息來調(diào)整 AGV 的行駛路線。
本網(wǎng)頁所展示的有關(guān)【Q300激光定位模塊_AGV配件_北京辰天科技有限公司】的信息/圖片/參數(shù)等由移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟的會員【北京辰天科技有限公司】提供,由移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟會員【北京辰天科技有限公司】自行對信息/圖片/參數(shù)等的真實性、準確性和合法性負責(zé),本平臺(本網(wǎng)站)僅提供展示服務(wù),請謹慎交易,因交易而產(chǎn)生的法律關(guān)系及法律糾紛由您自行協(xié)商解決,本平臺(本網(wǎng)站)對此不承擔(dān)任何責(zé)任。您在本網(wǎng)頁可以瀏覽【Q300激光定位模塊_AGV配件_北京辰天科技有限公司】有關(guān)的信息/圖片/價格等及提供【Q300激光定位模塊_AGV配件_北京辰天科技有限公司】的商家公司簡介、聯(lián)系方式等信息。
在您的合法權(quán)益受到侵害時,歡迎您向郵箱發(fā)送郵件,或者進入《網(wǎng)站意見反饋》了解投訴處理流程,我們將竭誠為您服務(wù),感謝您對移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟的關(guān)注與支持!
移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟 SYSTEM All Rights Reserved 版權(quán)所有